

美国研发最快、最准确的反无人机和低空空域感知解决方案
2024年7月17日,美国反无人机系统制造商Dedrone在其官网发布了新一代计算机视觉(CV)模型,以供客户选择使用。该模型名为Pythagoras 1,最近发布的新版本主要针对模型对所有对象类别的精确度和大多数对象类别的召回率进行了优化;还对模型的运行时间进行了重大改进。

Pythagoras 1这一核心引擎既可用于防范未经授权的无人机,又能使生产型无人机在越来越复杂的空域中安全航行。
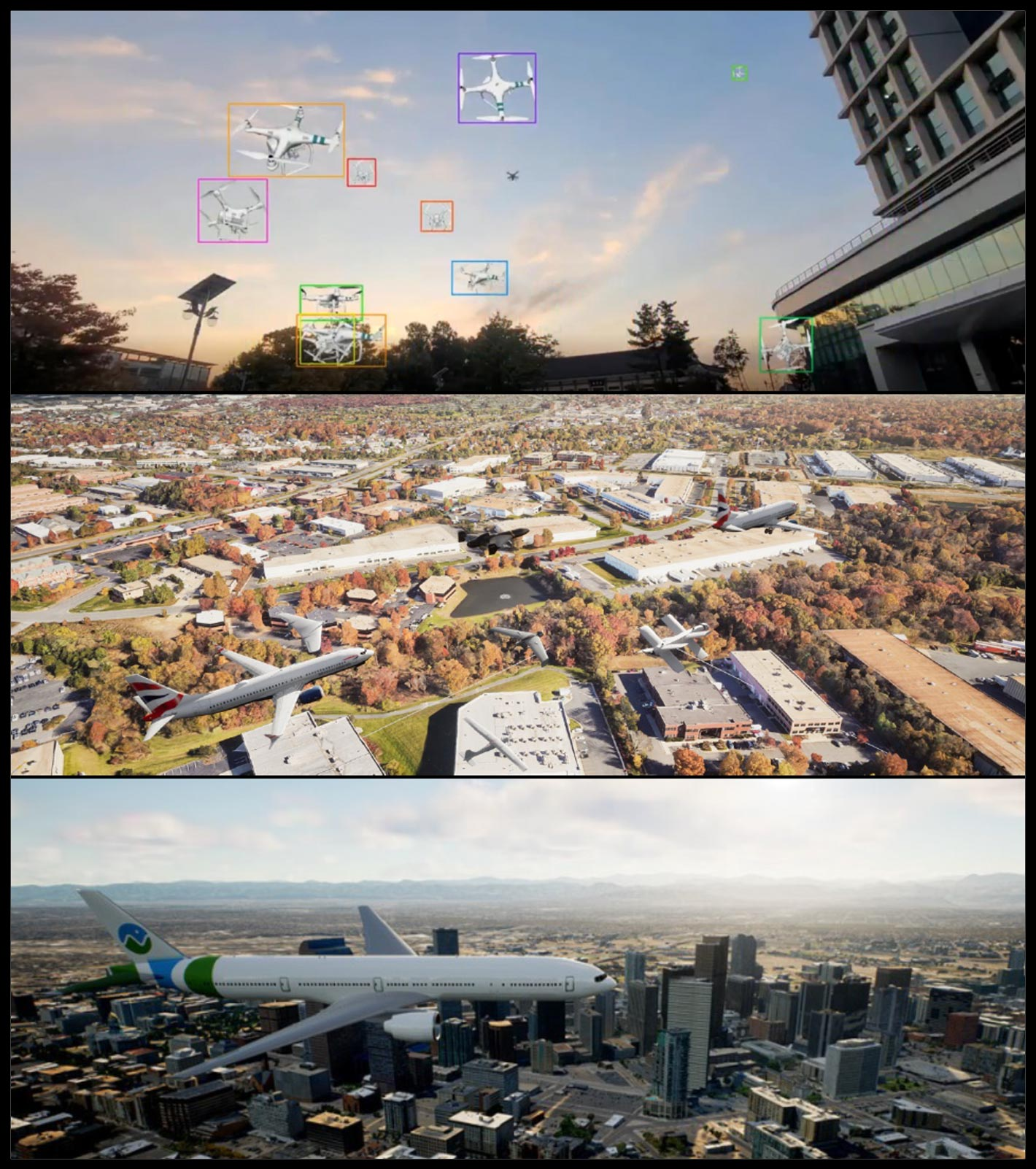
Pythagoras 1在识别四旋翼无人机、固定翼无人机、鸟类、直升机和飞机的速度和探测精度等方面的性能已经有了大幅提升。
这一新一代模型目前正在为Dedrone的所有产品提供支持,包括该公司最新的如DedroneBeyond一类的传感器融合无人机保护解决方案。
Dedrone公司专业的机器学习(ML)团队利用三个核心触发器,提供了世界上最快、最准确的基于传感器融合的空域安全解决方案。
首先,团队选用了合适的图形处理器(GPU)——H100。众所周知,这款机器作为机器学习训练机器,具有当今最顶级的性能。该公司目前拥有多台H100并每天24小时不间断运行,持续优化公司的解决方案。
接下来,团队利用PyTorch作为DedroneTracker.AI计算机视觉模型的框架,着手建立在保持反无人机任务性能的同时适配保护较低空域安全的模型,以期解决客户反馈的问题——即进一步降低误报率,提高模型探测飞行物体的能力。团队在PyTorch基础上构建出了全新的神经网络架构,对于Dedrone公司来说,Pythagoras 1模型的成功开发,是低空域感知探测技术的一次重大飞跃。
最后,团队利用已经建立了7年之久的数据集库,通过模拟数据集和对特定案例的主动学习整合,进一步扩充了数据集库,并将这些数据驱动回团队的模型训练过程。
就改进成果来看,Pythagoras 1将视频跟踪器的速度平均提高了20%,此外还显著提高了准确性,减少了误报和漏报。下图详细说明了真正例、假正例和假负例的情况:

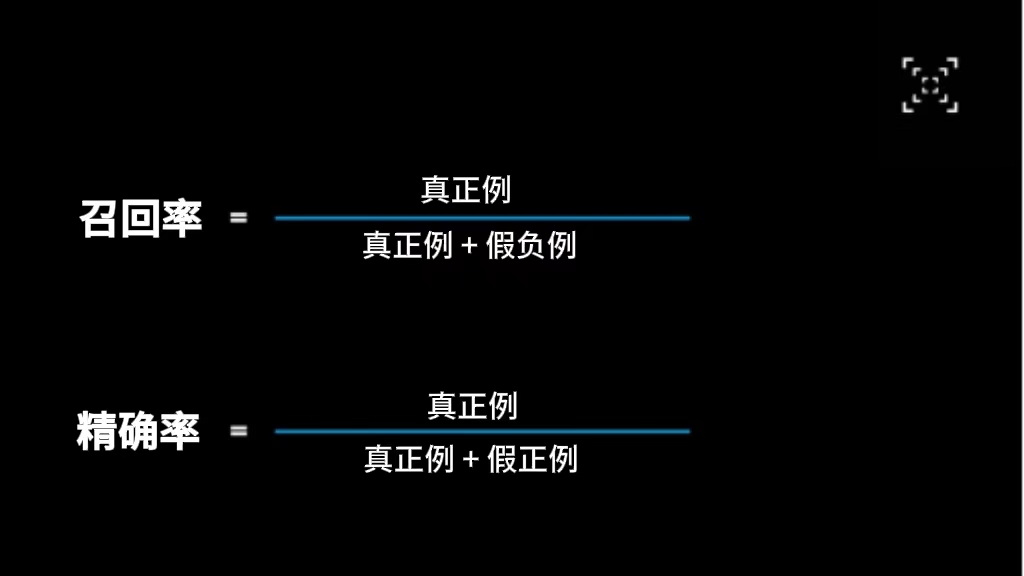
这些改进可以通过提高平均精确度(mAP)和平均召回率(mAR)来衡量。召回率和精确率是用来评估探测器性能的两个关键指标。但实际上,这两个指标之间的数值是需要权衡的。提高对空域内物体进行分类的阈值会减少误报,从而提高精确度,然而,这在实践中往往会导致更多的误判,因此召回率会降低。下面是这两个指标的计算方式:
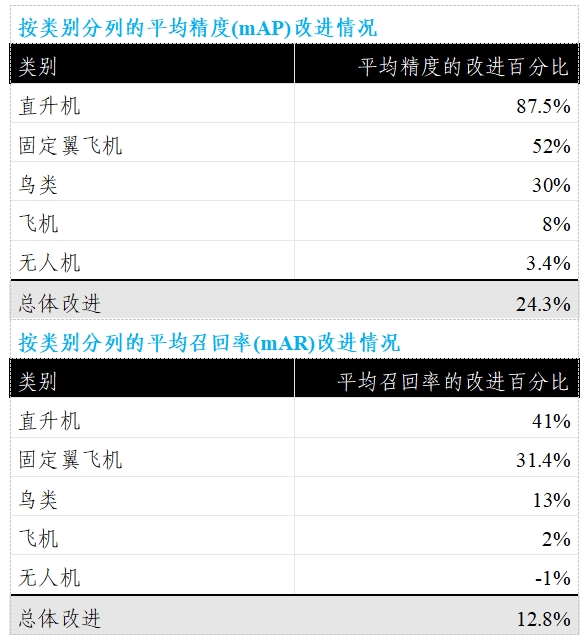
此外,模型还将探测极小型无人机的平均精度提高了14倍。这些改进体现在所有物体和多个空间尺度上。探测指标详见下表:
为了实现改进其端到端人工智能解决方案这一目标,Dedrone公司购买了一个新的计算机集群,利用英伟达公司的旗舰级机器学习图形处理器——H100,与Lambda Labs合作构建了新的计算机集群。由于团队调整了训练代码以使用多个GPU,这一新硬件缩短了他们在数百万帧视频中训练模型所需的时间;反过来,这也使团队能够以更高的速度运行实验。上述实验涉及神经网络架构的修改以及超参数的指导性调整。此外,由于模型的评估基础架构是基于权重和偏差(Weights and Biases)的,这让团队的研究人员能够轻松地可视化模型结果,并了解他们可以在哪些方面进行调整改进。此外,“权重与偏差”还配备了一个超参数调整框架——“扫频”(Sweeps),它适用于模型训练的每个架构。
Pythagoras 1是之前模型的全面升级版,它采用了全新的神经网络架构、训练框架和部署框架。神经网络架构可以更容易地将特征联系起来,并摆脱了其他探测器可能会混淆网络的一些假设;训练框架比以前的框架更强大,使研究人员能够快速建立原型并尝试新的想法,其使用的新推理引擎大大缩短了模型在视频上的执行时间,这反过来又使研究人员能够在神经网络中利用更多的“神经元”,而每秒帧数的成本与以前的模型相差无几;此外,与公司以前的部署方法相比,该模型可以利用更多的像素信息,而不会在运行时间上受到很大影响,这一变化使该模型能够快速处理和推断4k视频中的内容,从而为作为应对无人机的第一响应者(DFR)等新的空域感知挑战做好准备。
在机器学习中,数据就是一切。好的数据可以大大提高模型的性能,而差的数据则会导致次优结果,无论模型的复杂程度如何。这句格言概括了这一概念:“质量优于数量”。
该模型的机器学习始于一个基线数据集,其对象分布如下图所示。这些数据从不同的地点收集而来,但其中大部分是无人机。研究人员使用Dedrone公司的内部工具对这些帧进行了注释,从而为训练数据集奠定了基础。

为了提高模型的性能,研究人员需要丰富数据并提高数据质量。由于了解到该数据集缺乏丰富性,研究人员采用了各种创新方法来进行数据整理和完善(DCAP),主要策略之一是就将主动学习融入模型训练过程。主动学习包括智能地选择信息量最大的数据点进行注释,从而以更少的数据样本提高模型性能。
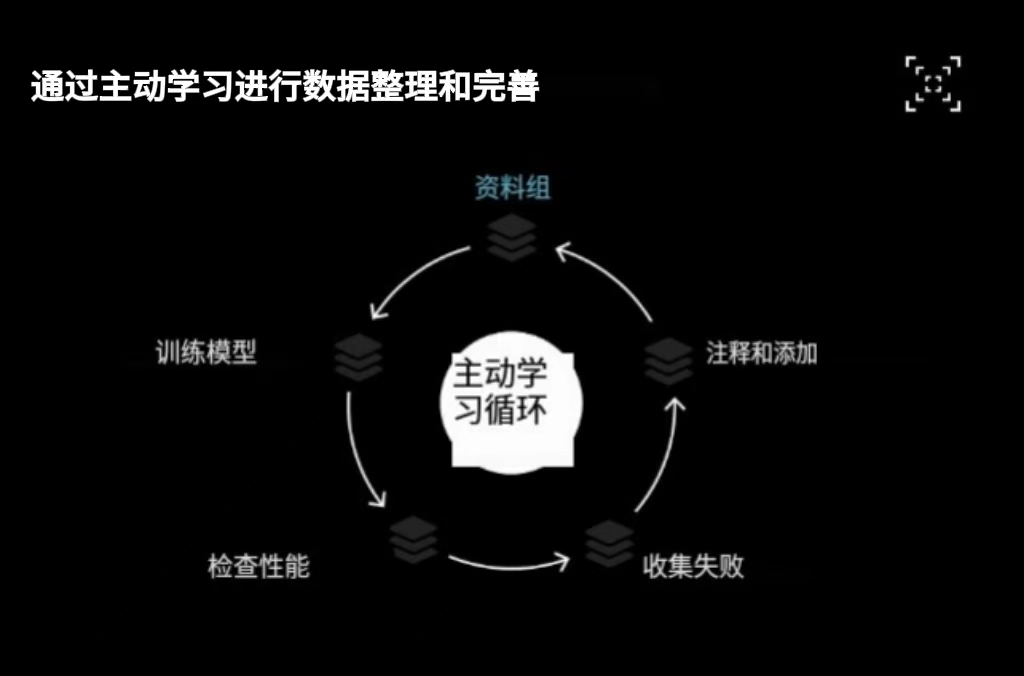
该模型的主动学习循环包括识别失败案例,如错误警报、错误分类和漏检,例如一个场景中有多个物体的情况。失败案例对于了解我们的系统在哪些方面需要改进至关重要。
如今,这种改进方法仍在继续;通过积极寻找失败案例,研究人员可以据此策划出更全面、更有效的训练数据集。确定的失败案例会被送到外包注释公司进行彻底的注释和质量保证。这一过程完成后,新数据将被整合到训练集中,为下一次主动学习迭代做好准备。这种迭代过程确保了模型性能的不断提高。通过这种方法,训练集中最近又增加了200万张注释图像。
当然,人工数据在机器学习和计算机视觉中也起着至关重要的作用,因为它有助于填补真实世界数据集的空白、增强多样性并平衡类别分布。通过生成合成图像可以模拟各种场景,扩充现有数据,并创建具有挑战性的案例,从而提高模型的稳健性和准确性。在真实数据稀缺或难以获得的情况下,这一点就显得更加重要。
因此,为了进一步增强Dedrone数据集,研究人员还利用AutoKat工具采取了数据增强技术。AutoKat通过在现有图像中添加或不添加注释,在图像中绘制人造物体,从而增强现有图像。在这个项目中,他们新增了各种模型,包括21架直升机、7架飞机和11架无人机(包括四旋翼无人机、固定翼无人机,甚至还有3架Group-3无人机),这些模型可以缩放、调整方向并放置在图像中的任何位置。
通过这种方法可以创建出一组多样化的图像,并尤其有助于通过生成大量直升机和飞机注释来平衡数据集。它还有助于解决物体大小分布的问题,这对于推进模型处理4K图像至关重要。虽然AutoKat生成的图像可能无法完全捕捉真实世界图像的噪点、光照和清晰度,但它们依然为增强数据集做出了重大贡献。以下是为Pythagoras 1项目扩展的一些图像示例。

另一种前景广阔的方法是利用模拟环境和物体生成全人工图像。该公司的模拟团队正在努力创造逼真的图像,在这些图像中,所有物体都被渲染在一起,从而提供全面的地面实况信息。模拟环境可以灵活地试验各种照明条件、天气情况以及在现实生活中难以复制的独特情况,如飞越城市上空的神风特攻队无人机。而这一方法的主要挑战在于如何将模拟传感器和镜头配置与现实生活中使用的传感器和镜头配置相匹配。尽管困难重重,但研究人员相信,在未来,这种模拟数据方法将进一步提高模型的性能。下面是一些展示正在开发的模拟世界的图片。
数据是任何机器学习模型的生命。如果数据冗余或贫乏,模型可能会学习到不理想的行为,或者不能很好地泛化到未见过的实例中。通过消融过程,研究人员确定了改进模型的关键数据扩充,Dedrone的数据整理和完善团队已经收集并将继续提供理想的多样化数据,Pythagoras可以在这些数据上进行训练,数据的不断改进也将继续推动Pythagoras性能的提升。
对于Dedrone公司的研究团队来说,他们的愿景是探测、跟踪和分类天空中的每一个飞行物。通过Pythagoras 1,Dedrone已经朝着这个目标迈出了一大步。这一模型利用最快的处理技术、最新的机器学习模型研发成果以及强大的数据整理、完善和模拟团队,为低空空域感知和反无人机系统提供了世界上最快、最准确的解决方案。研究团队将继续致力于Pythagoras 1模型的优化和改进,并将很快发布更新版本。


